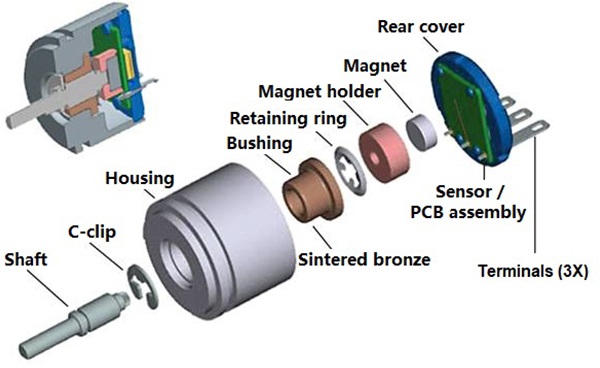
磁気式ロータリエンコーダを分解する機会があると、通常、上記のような内部構造を見ることができます。磁気エンコーダは、機械シャフト、シェル構造、エンコーダ端の PCB アセンブリ、および小型のエンコーダで構成されています。ディスクマグネットメカニカルシャフトの端にあるシャフトとともに回転します。
磁気エンコーダはどのように回転位置フィードバックを測定しますか?
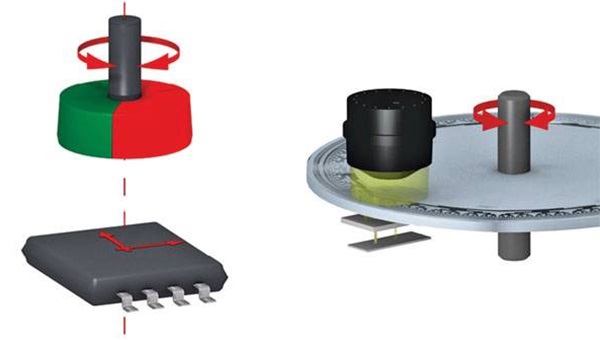
ホール効果: 電流が流れる方向と垂直な方向に磁場が印加されたときに、電流が流れる導体に電位差が生じること。
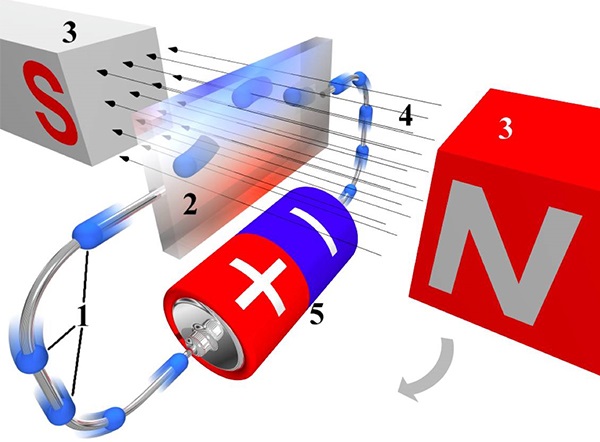
導体に印加された磁界を電流の流れる経路を軸として上図の矢印の方向に回転させると、磁界と導体のなす角度の変化によりホール電位差が変化し、電位差の変化傾向は正弦曲線になります。したがって、通電された導体の両側の電圧に基づいて、磁場の回転角度を逆に計算できます。これは、回転位置フィードバックを測定する際の磁気エンコーダの基本的な動作メカニズムです。
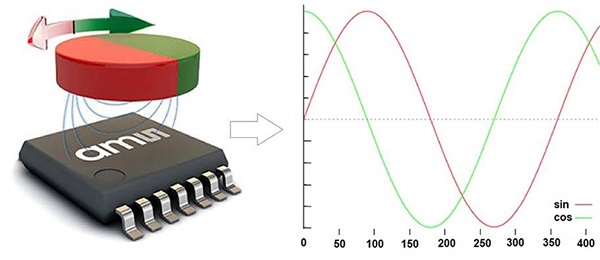
レゾルバが相互に直交する 2 組の出力コイルを使用する原理と同様に、磁界の回転位置間の固有の対応を確保するために、磁気エンコーダにも相互に直交する電流方向を持つ 2 つ (または 2 対) のホール誘導素子が必要です。と出力電圧(組み合わせ)。
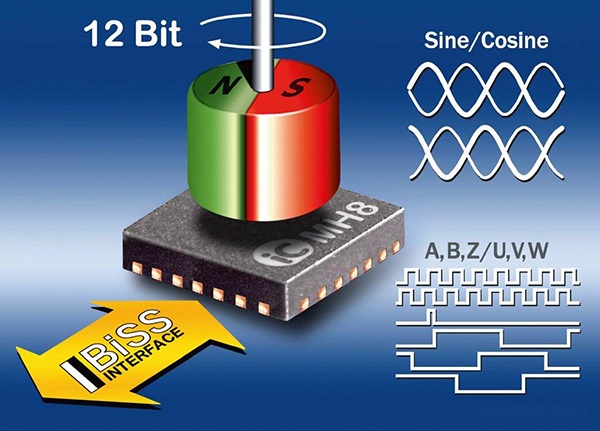
現在、磁気エンコーダで使用されるホール センサー (チップ) は一般に高度に集積化されており、ホール半導体コンポーネントと関連する信号処理および調整回路が統合されているだけでなく、サインおよびコサイン アナログなどのさまざまなタイプの信号出力モジュールも統合されています。信号、方形波デジタルレベル信号、またはバス通信出力ユニット。
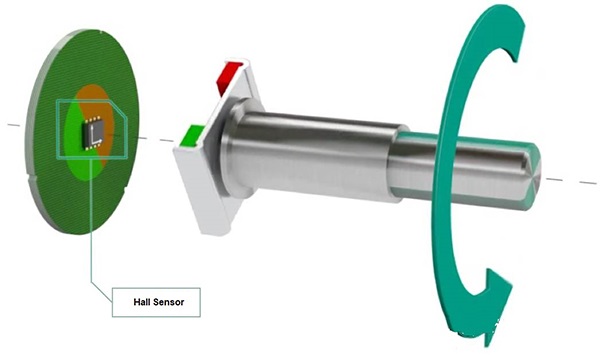
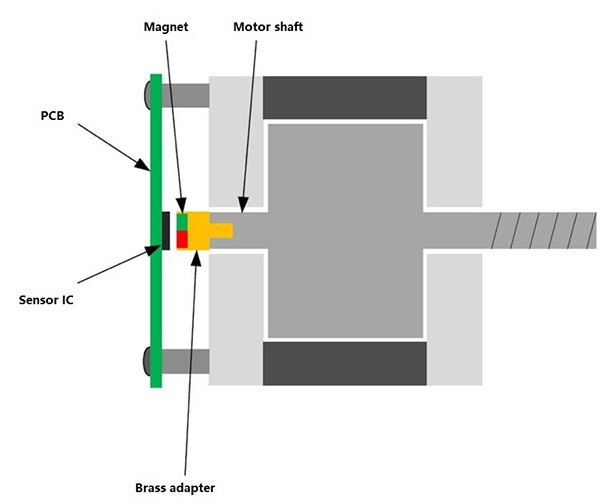
このように、エンコーダ回転軸の先端に磁界を発生させる焼結ネオジム磁石のような永久磁石を設置し、前述のホールセンサチップをPCB基板上に配置し、エンコーダ先端の永久磁石に近づけます。特定の要件(方向と距離)に従ってシャフトを調整します。
ホールセンサーから出力される電圧信号をPCB基板を介して解析することで、エンコーダーローターの回転位置を特定します。
磁気エンコードの構造と動作原理により、磁石の材質、磁石の形状、磁化の方向など、この永久磁石に関する特別な要件が決まります。直径方向に磁化されたネオジム磁石ディスクは磁石の最良のオプションです。 Ningbo Horizon Magnetics は、多くのメーカーにいくつかのサイズの磁気エンコードを供給した経験があります。直径ネオジムディスク磁石、D6x2.5mmとD10x2.5mmの直径ディスクネオジム磁石を使用した最も人気のあるモデルです。
従来の光学式エンコーダと比較して、磁気式エンコーダは複雑なコードディスクや光源を必要とせず、部品点数が少なく、検出構造が単純であることがわかります。さらに、ホール素子自体にも、構造がしっかりしており、小型、軽量、長寿命、耐振動性、塵埃、油、水蒸気、塩霧の汚染や腐食の心配がないなど、多くの利点があります。
磁気エンコーダ技術を電動モータの回転位置フィードバックに応用すると、焼結NdFeBマグネットシリンダー磁気エンコーダのモータ軸端に直接取り付けることができます。このようにして、従来のフィードバックエンコーダを使用する場合に必要な移行カップリングベアリング(またはカップリング)を排除し、非接触位置測定を実現することで、動作中の機械シャフトの振動によるエンコーダの故障(または損傷)のリスクを軽減できます。電気モーターの動作。したがって、電動機の動作の安定性の向上に役立ちます。
投稿日時: 2022 年 7 月 21 日